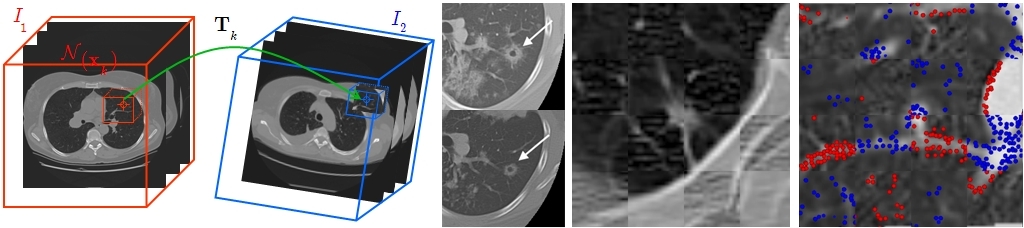
| Location Registration and Recognition (LRR) for Longitudinal Evaluation of Corresponding Regions in CT Volumes This page gives a high level overview of our research on Location Registration and Recognition (LRR). For more details, please refer to our article published in MICCAI 2008 proceedings. Contents Overview The algorithm described in this paper takes (a) two temporally separated CT scans,  and and  , and (b) a series of locations in , and it produces, for each location, an affine transformation mapping the locations and their immediate neighborhood from to . It does this without deformable registration by using a combination of feature extraction, indexing, refinement and decision processes. Together these essentially "recognize" the neighborhoods. We show on lung CT scans that this works at near interactive speeds, and is at least as accurate as the Diffeomorphic Demons algorithm [1]. The algorithm may be used both for diagnosis and treatment monitoring. , and (b) a series of locations in , and it produces, for each location, an affine transformation mapping the locations and their immediate neighborhood from to . It does this without deformable registration by using a combination of feature extraction, indexing, refinement and decision processes. Together these essentially "recognize" the neighborhoods. We show on lung CT scans that this works at near interactive speeds, and is at least as accurate as the Diffeomorphic Demons algorithm [1]. The algorithm may be used both for diagnosis and treatment monitoring. Motivation and Intuition -
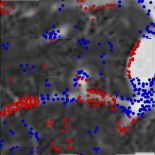
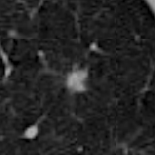
| Given: | image volumes  and and  | | set of locations  from . from . | 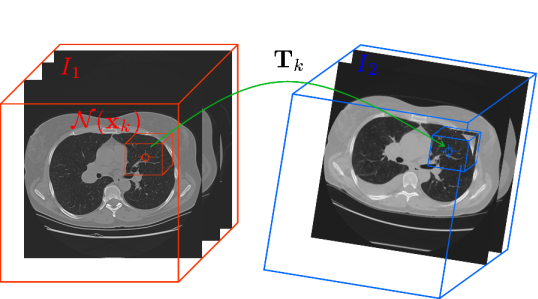 - Goal: find, for each
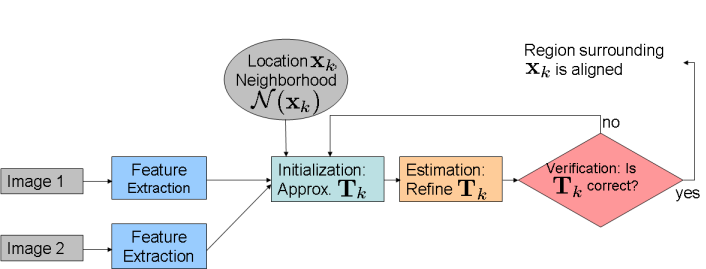
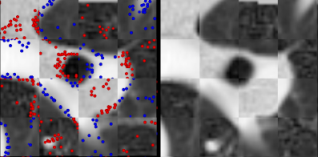
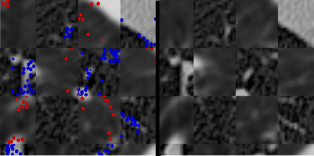
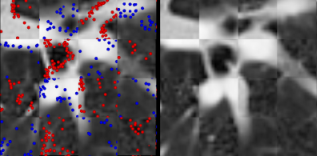
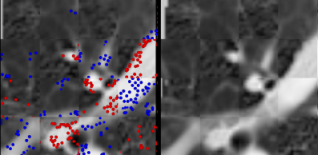
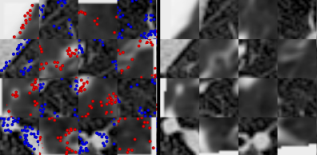
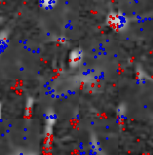
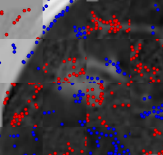
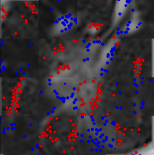
 , the affine transformation , the affine transformation  , which best aligns neighborhood , which best aligns neighborhood  with a region of . with a region of . Algorithm Outline Results Summary - Algorithm for Location Registration and Recognition (LRR) without solving deformable registration first or simultaneously
- Technique to obtain initial transform using shape contexts
- Novel verification algorithm
- Handle changes within the local regions
- At least as accurate as the deformable registration
- Fast algorithm runs at near interactive speeds
Future work: - Combining results from multiple locations, exploring other applications
Publications and Further Reading -
  Sofka, M., V. Stewart, C., 2010. Location Registration and Recognition (LRR) for Serial Analysis of Nodules in Lung CT Scans. Medical Image Analysis 14, 407–428. Sofka, M., V. Stewart, C., 2010. Location Registration and Recognition (LRR) for Serial Analysis of Nodules in Lung CT Scans. Medical Image Analysis 14, 407–428. In the clinical workflow for lung cancer management, the comparison of nodules between CT scans from subsequent visits by a patient is necessary for timely classification of pulmonary nodules into benign and malignant and for analyzing nodule growth and response to therapy. The algorithm described in this paper takes (a) two temporally-separated CT scans, I1 and I2, and (b) a series of nodule locations in I1, and for each location it produces an affine transformation that maps the locations and their immediate neighborhoods from I1 to I2. It does this without deformable registration and without initialization by global affine registration. Requiring the nodule locations to be specified in only one volume provides the clinician more flexibility in investigating the condition of the lung. The algorithm uses a combination of feature extraction, indexing, refinement, and decision processes. Together, these processes essentially “recognize” the neighborhoods. We show on lung CT scans that our technique works at near interactive speed and that the median alignment error of 134 nodules is 1.70 mm compared to the error 2.14 mm of the Diffeomorphic Demons algorithm, and to the error 3.57 mm of the global nodule registration with local refinement. We demonstrate on the alignment of 250 nodules, that the algorithm is robust to changes caused by cancer progression and differences in breathing states, scanning procedures, and patient positioning. Our algorithm may be used both for diagnosis and treatment monitoring of lung cancer. Because of the generic design of the algorithm, it might also be used in other applications that require fast and accurate mapping of regions. @article{sofka:mia10,
author = {Sofka, Michal and V.\ Stewart, Charles},
title = {Location Registration and Recognition ({LRR}) for
Serial Analysis of Nodules in Lung {CT} Scans},
journal = {Medical Image Analysis},
year = {2010},
volume = {14},
number = {3},
pages = {407--428},
url = {http://www.sofka.com/projects/lrr/}
}
-
  Sofka, M., V. Stewart, C., 2008. Location Registration and Recognition (LRR) for Longitudinal Evaluation of Corresponding Regions in CT Volumes. In: Proceedings of the 11th International Conference On Medical Image Computing and Computer-Assisted Intervention (MICCAI 2008). pp. 989–997. Sofka, M., V. Stewart, C., 2008. Location Registration and Recognition (LRR) for Longitudinal Evaluation of Corresponding Regions in CT Volumes. In: Proceedings of the 11th International Conference On Medical Image Computing and Computer-Assisted Intervention (MICCAI 2008). pp. 989–997. The algorithm described in this paper takes (a) two temporally-separated CT scans, I1 and I2, and (b) a series of locations in I1, and it produces, for each location, an affine transformation mapping the locations and their immediate neighborhood from I1 to I2. It does this without deformable registration by using a combination of feature extraction, indexing, refinement and decision processes. Together these essentially “recognize” the neighborhoods. We show on lung CT scans that this works at near interactive speeds, and is at least as accurate as the Diffeomorphic Demons algorithm. The algorithm may be used both for diagnosis and treatment monitoring. @inproceedings{sofka:miccai08,
author = {Sofka, Michal and V.\ Stewart, Charles},
title = {Location Registration and Recognition ({LRR}) for
Longitudinal Evaluation of Corresponding Regions in
{CT} Volumes},
booktitle = {Proceedings of the 11th International Conference on
Medical Image Computing and Computer-Assisted
Intervention (MICCAI 2008)},
pages = {989--997},
year = {2008},
volume = {2},
month = "6--10~" # sep,
url = {http://www.sofka.com/projects/lrr/}
}
Bibliography [1] Vercauteren, T., Pennec, X., Perchant, A., Ayache, N.: Non-parametric diffeomorphic image registration with the demons algorithm. In: Proceedings of the 10th International Conference of Medical Image Computing and Computer-Assisted Intervention (MICCAI 2007), Brisbane, Australia (2007) 319-326.
|