| Download Command-Line Executable of the Likelihood Ratio Vesselness This executable will run Likelihood Ratio Vesselness (LRV) tracing to extract vessel centerlines. It will also extract landmarks (vessel branching and cross over points) which are repeatable features that could be used for registration or tracking. 08/11/2007: Updated downloads include landmark extraction (vessel branching and crossover points). | Platform | Training Data Used | | Windows (08/11/2007) | STARE and DRIVE* | STARE | DRIVE | | FreeBSD (08/11/2007 static build on FreeBSD 6.2) | STARE and DRIVE* | STARE | DRIVE | | Linux (08/11/2007 static build on kernel 2.6) | STARE and DRIVE* | STARE | DRIVE | | Mac OS X 10.3.9 (7/15/2008) | STARE and DRIVE* | STARE | DRIVE | * Training using STARE data set and DRIVE data set (with manual segmentations by observer 1). Use this version for best results.
Unzipping Note: The MS Windows XP ``Compressed (zipped) folders'' might not be compatible with other zip archives. The files were zipped with Winzip 12.0 and it was possible to unzip them with ``Compressed (zipped) folders''. Please let me know if you have any problems.
Update 8/23/2009: There seem to have been an occasional problem with the downloads. This has been fixed. | Run After running the vessel tracer without any arguments (or with ``-?'' argument), usage information is printed as follows:
Usage: vessel_tracer.exe [ string] [ string] [ float] [-s string] [-d string]
REQUIRED:
| string | Image file to process [''] | | string | Tracer [parallel] edge, [matched] [''] | | float | Sensitivity of the tracer [0] | | | | Optional: | | Switch | Type | Help [default value] | | -s | string | Suffix for the trace result [''] | | -d | string | Directory where to save result images [''] | | -? | bool | Print this message |
Notes - The first mandatory argument specifies retinal image file in JPEG, PNG, BMP, or TIFF format.
- The second mandatory argument specifies method to use for tracing. Two methods are available: Parallel edge tracing as proposed in [Can, ITBM 1999] and LRV based tracing as proposed in [Sofka, TMI 2006]. Enter string ``parallel'' or ``matched'' (without the quotes).
- Sensitivity of the tracer specifies how aggressive the tracing is. For LRV. this is a threshold on the likelihood ratio and 1.0 - 2.0 is a good value. For parallel edge tracing the parameter specifies image contrast sensitivity level in a local window and value 2.5 - 3.5 gives best results.
- Option -s specifies a suffix added to the image image to write image with vessel traces overlayed on the top, image of binary traces, and a text file with trace results.
- Option -d specifies where to save the results (default is the current directory).
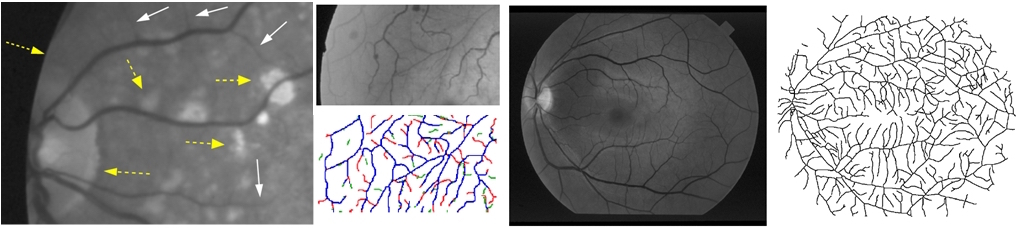
This executable can be used for non-commercial purposes only. Results Results include vessel centerlines and landmarks (vessel branching and crossover points). Three files are written for each run: 1) Vessel traces and landmarks overlayed on the original image, 2) Binary image of vessel traces, and 3) Test file with vessel tracing and landmark extraction results in the following format (comments on the right):
| trace_points = { | | // beginning of the first trace | | vec_num = N | | // number of trace pts. in the first trace | | vec_element_0 = { | | // beginning of first trace pt. | | prrepl_trace_point: location = | x0 y0 | // location of the trace pt. | | direction = | n0 m0 | // vessel orientation vector at the trace pt. | | width = | w0 | // vessel width at the trace pt. (scale for LRV) | | strength = | s0 | // vesselness strength of the trace pt. | | } | | | | ... | | // continue output all N trace pt. of the first trace | | vec_element_N-1 = { | | // beginning of the last trace pt. of the first trace | | prrepl_trace_point: location = | x1 y1 | | | direction = | n1 m1 | | | width = | w1 | | | strength = | s1 | | | } | | | | } | | | | | | | | trace_points = { | | // output next trace | | ... | | | | } | | | | | | | landmarks = { | | // beginning of the landmark listing | | vec_num = M | | // number of landmarks | | vec_element_0 = { | | // beginning of first landmark | | prrepl_landmark: group id = | -1 | // internal use, ignore this field | | radius = | r0 | // landmark radius (median width of its vessels) | | location = | x0 y0 | // location of the landmark | | } | | | | ... | | // continue output all M landmarks | | vec_element_N-1 = { | | // beginning of the last landmark | | prrepl_landmark: group id = | -1 | | | radius = | r1 | | | location = | x1 y1 | | | } | | | | } | | | | | | | Publications and Further Reading When you publish results using the executable, please acknowledge the authors by citing the following paper: -
  Sofka, M., V. Stewart, C., 2006. Retinal Vessel Extraction Using Multiscale Matched Filters, Confidence and Edge Measures. IEEE Transactions on Medical Imaging 25, 1531–1546. Sofka, M., V. Stewart, C., 2006. Retinal Vessel Extraction Using Multiscale Matched Filters, Confidence and Edge Measures. IEEE Transactions on Medical Imaging 25, 1531–1546. Motivated by the goals of improving detection of low-contrast and narrow vessels and eliminating false detections at non-vascular structures, a new technique is presented for extracting vessels in retinal images. The core of the technique is a new likelihood ratio test that combines matched-filter responses, confidence measures and vessel boundary measures. Matched filter responses are derived in scale-space to extract vessels of widely varying widths. A vessel confidence measure is defined as a projection of a vector formed from a normalized pixel neighborhood onto a normalized ideal vessel profile. Vessel boundary measures and associated confidences are computed at potential vessel boundaries. Combined, these responses form a 6-dimensional measurement vector at each pixel. A training technique is used to develop a mapping of this vector to a likelihood ratio that measures the “vesselness” at each pixel. Results comparing this vesselness measure to matched filters alone and to measures based on the Hessian of intensities show substantial improvements both qualitatively and quantitatively. The Hessian can be used in place of the matched filter to obtain similar but less-substantial improvements or to steer the matched filter by preselecting kernel orientations. Finally, the new vesselness likelihood ratio is embedded into a vessel tracing framework, resulting in an efficient and effective vessel centerline extraction algorithm. @article{sofka:tmi06,
author = {Sofka, Michal and V.\ Stewart, Charles},
title = {Retinal Vessel Extraction Using Multiscale Matched
Filters, Confidence and Edge Measures},
journal = {IEEE Transactions on Medical Imaging},
year = {2006},
volume = {25},
number = {12},
pages = {1531--1546},
month = dec,
url = {http://www.sofka.com/vessels.html}
}
|